400-123-4657


作者:佚名 时间:2024-09-09 13:03:06
上一篇讲到,现在我们还有两个问题,第一,为什么上一步减少get_vec_element的优化,看起来没有作用。第二,combine4是否还有进一步优化的空间。
要回答这两个问题,我们需要先稍微了解一下现代处理器的一些内部操作流程。
前面都是些基本的优化操作:
这几个方法都是处理器无关的,不依赖任何机器特性。接下来,就要利用处理器的一些处理方式来有正对性的优化了。
从汇编级来看,指令都是一条条执行,每条指令都包括从寄存器或者存储器取值,执行一个操作,并把结果放回寄存器或者存储器。但在实际的处理器中,是同时对多条指令求值的,这个现象称为指令级并行,在某些设计中,可以有100或更多的指令在处理中。当然,处理器会有很多精细的机制来保证,指令看起来是简单的顺序执行的。
似乎进入了魔法领域
下图是基于近期Intel处理器的一个近似结构,它的一个特性叫做超标量,意思是它可以在每个时钟周期执行多个操作,而且是乱序的,即可能跟他们在机器级代码中的循序不一致。整个设计有两个主要部分ICU(Instuction Control Unit 指令控制单元)和EU(Execution Unit 执行单元)。
听到ICU是不是觉得虎躯一震。。。
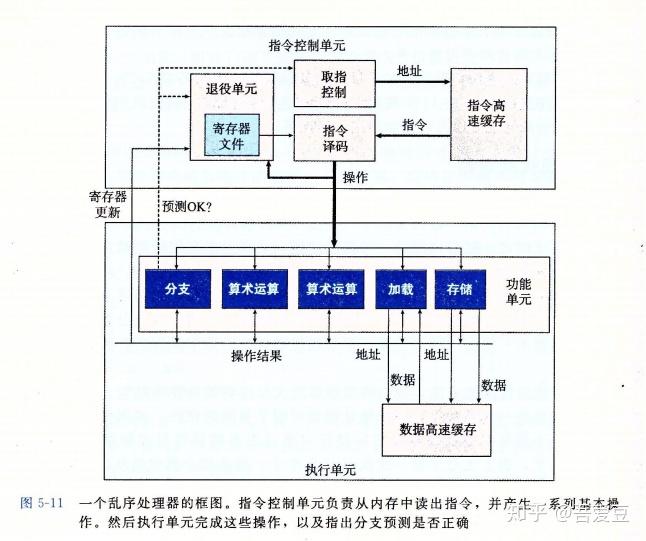
处理器在遇到分支跳转的时候,会采用一种分支预测的技术,用来投机提前执行一些操作。预测就有可能错误,当预测错误的时候,提前执行的东西就浪费了,需要重新取出另一个方向上的指令。
指令解码将汇编指令转换成一组基本操作。例如addl %eax,%edx 产生一个加法操作,而addl %eax,8(%edx)则会产生三个操作——加载内存,加法操作,存回内存。
如图5.11中,有一个退役单元, 这个部分记录正在进行的操作。一旦一条指令操作完成了,而且所有引起这条指令的分支点也都被确认为预测正确,那么这条指令就可以退役了,所有对程序寄存器的更新都可以被实际执行了。反之,如果预测错误,则指令被清空,计算出的结果被抛弃。
任何对程序寄存器的更新都只会在指令退役的时候才会发生。
所谓寄存器重命名就是一种减少寄存器读写等待的技术,一个要写寄存器的操作,可能因为是在预测分支中,无法直接写入,需要等待后续确认之后才能写入,那么该分支上后续指令需要使用这个寄存器,那么就在一张特定的表中取查询该值,从而跳过等待。即使没有分支预测,也能加快指令的执行,无需等待写入。
这个设计可以考虑怎么利用到项目中,对于那些更新数据会引起一连串变化的操作,可以进行数据缓存,把实际的更新延后。而取数据的时候需要先检测缓存。
下标是Intel Core i7参考机的一些算术性能。这里的容量是表示该运算的功能单元的数量。这个数量也是处理器能同时处理多个相同操作的基础。
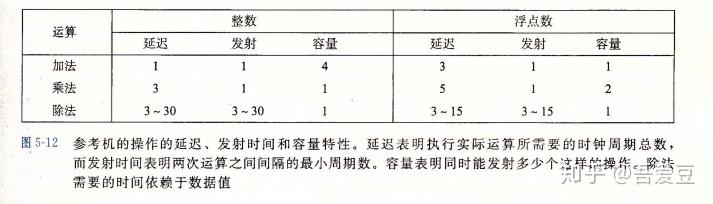
加法和乘法的发射时间都是1,这是通过流水线来实现的。当个操作没有结束就可以开始新的阶段操作。
除法运算时没有流水线实现的,它的发射时间等于延迟,说明新的运算需要等上一个运算结束后才开始。所以除法很慢。
功能单元的最大吞吐量为发射时间的倒数。容量可以增加吞吐量,例如容量为C,发射时间为I ,则吞吐量为 C / I 。而下文提到的吞吐量界限则是吞吐量的CPE表示,即吞吐量的倒数。例如吞吐量为2,表示每个时钟周期能执行两个操作,即相应的CPE为0.5 。
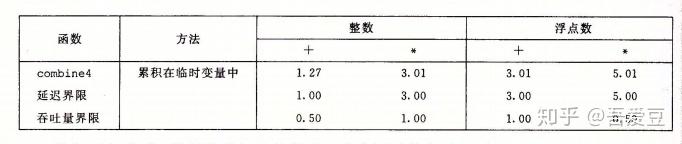
前面combine4函数目前为止是最快的,这里对比下该函数与理论值的比较:可以看到距离理论值还有一定的距离,我们能达到理论值吗
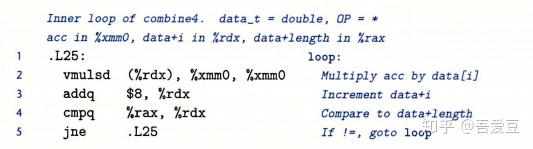
combine4循环的汇编代码如下:
其操作对寄存器使用如下:
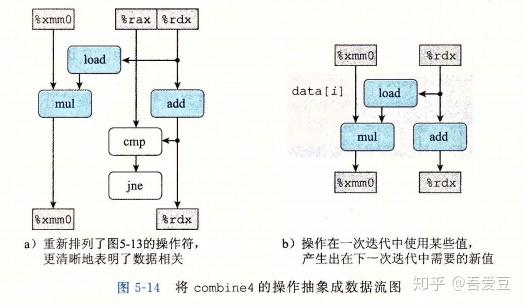
从这个图上,就能够看得出来,mul操作跟load,add操作是并行的。从上面的表格可以看到combine4浮点数的延迟为5.01,而浮点的mul的延迟正是5.0,这就是说mul是整个瓶颈,其他操作都是和mul并行执行的。
并行!指令集的并行,一些并不互相依赖的操作是可以并行执行的,占用的时间也就忽略不计了。这就解释了前面的第一个问题,为什么优化了一个函数调用居然没有效果,就是因为之前内存的访问是瓶颈,其他的操作在内存访问的同时可能就完成了。
下面的习题示例很有意思:一个明明看起来操作变少了的算法,实际执行实际却更慢,先来看题目,要求计算多项式值 ,有以下方法
// 1.传统方法
double poly(double a[], double x, long degree) {
long i;
double result = a[0];
double xpwr = x;
for (i = 1; i <- degree; i++) {
result += a[i] * xpwr;
xpwr = x * xpwr;
}
return result;
}
// 2. 采用Horner法,减少乘法数量,反复提出x的幂, 即 a0 + x(a1 + x(a2 + ... ))
double poly2(double a[], double x, long degree) {
long i;
double result = a[degree];
for (i = degree - 1; i >=0; i--) {
result = a[i] + x * result;
}
return result;
}第一个方法需要的加法为degree次,乘法则是2*degree次。而第二个方法乘法变为degree次,足足减少了一倍。然而实际测试中,方法一的CPE为5.0,而方法二的CPE为8.0。
这是因为方法一种两个乘法操作实际上可以并行操作,瓶颈实际上是xpwr=x * xpwr;。在此操作期间上面的加法并行的执行完成了。而方法二中的乘法计算要依赖result,没法实现并行运算,需要算完乘法,再算加法,更新寄存器,然后才能开始下次循环。
自己想了一下,还是没有想懂。方法一第七行的加法,本身也是要依赖a[i]* xpwr的,这个乘法本身就需要5个周期,然后计算加法,更新寄存器。下一次循环,也是要等这个result更新完毕才能开始的吧? 如果这样的话,那么也是需要8个周期才对啊。如果少于这个,难道说7行的乘法结束后,就可以开始下次循环了?
强行自我解释:第7行的乘法不依赖result,乘法开始的同时,第8行立刻就开始了。第8行开始之后,就开始进行下一次循环的第7行,这个时候等待第一个第8行的操作结束,一旦结束,立刻又开始新的第8行。简而言之,第一种写法的时间从常用来看只跟第8行有关。第7行还有个 result+=难道这个不消耗的吗?消耗,不过呢,它可以在下一个第7行乘法开始的时候,再计算上一个result的加法,因为大家互相都不依赖。计算都是重叠的。
这就是指令集并行的威力。
前面简单介绍了什么叫循环展开,这一节正式的介绍如何使用循环展开来优化。
循环展开即增加每次迭代计算元素的数量,从而减少迭代的次数。循环展开从下面两方面改进性能:
// 对combine4做2*1的循环展开
void combine5(ver_ptr v, data_t *dest) {
...
long limit = length - 1;
for (i = 0; i < limit; i+=2) {
acc = (acc OP data[i]) OP data[i+1]; // 一次循环实际计算了两个元素
}
for (; i < length; i++) {
acc = acc OP data[i];
}
}对于展开次数k,上限limit应当设置为length - k + 1 ,并且后续需要增加循环 for(; i < length; i++)来处理尾部剩下的数值。
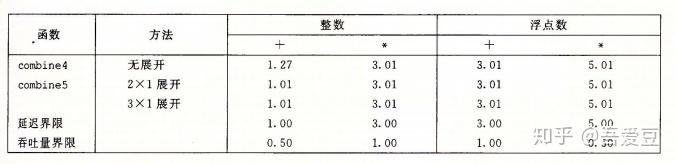
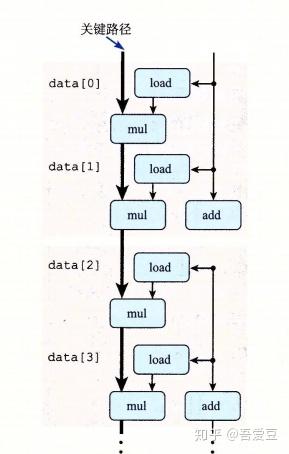
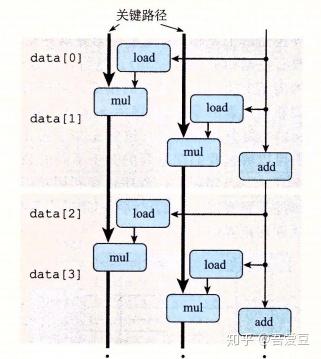
可以看到,展开之后,只有整数加法提供了效率,其他部分因为已经达到延迟的界限,没有任何改变。观察下图中操作的关键路径可以看出,跟之前的单循环差别不大,减少了add的次数而已。
现在到了关键的时候了,到达延迟界限之后,还可以继续提供性能吗?能够突破延迟界限,到达吞吐量界限吗?让我们拭目以待吧,是时候展现真正的技术了。
加法和乘法是完全流水线化的,这说明每个时钟周期都可以开始一个新的操作,即使前面的计算没有完成。而前面的循环展开没法使用这种能力,是因为每次计算的结果在同一个变量当中,下次循环需要等待上次的结果。基于这个情况就引出了新的优化方法:使用多个累积变量
简单来说就是,将前面函数的acc拆成两个变量,各算各的,最终再汇总。上代码。
void combine6(vec_ptr v, data_t *dest) {
long i;
long limit = length - 1;
long length = vec_length(v);
data_t *data = get_vec_start(v);
data_t acc0 = IDENT;
data_t acc1 = IDENT;
for (i = 0; i < limit; i+=2) {
acc0 = acc0 OP data[i]; // 分别计算各自的内容
acc1 = acc1 OP data[i+1];
}
for (; i < length; ++i) {
acc0 = acc0 OP data[i];
}
*dest = acc0 OP acc1;
}令人震惊的事情发生了,conbine6的性能突破了延迟界限!除了整数加法,其他操作提高了2倍!
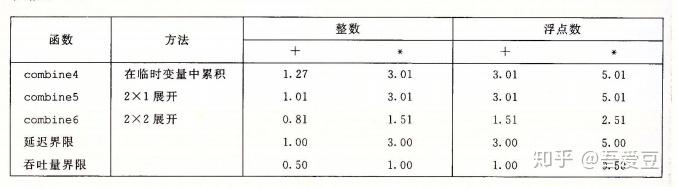
之前计算吞吐量界限的时候,它的计算是,延迟 / 模块的容量,这意味着,必须要并行的使用多个计算模块,才有可能逼近吞吐量界限。现在已经突破延迟,说明并行已经起作用了。
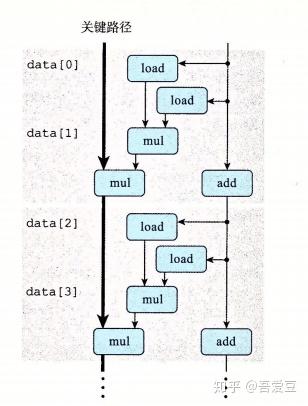
再来看2*2展开的操作图,对比之前的图,可以看出来,第二个load和mul都不需要等待前面的操作结束,直接开启了新的流水线。
当某类计算的相关所有功能单元的流水线都是满的时候,程序就能接近达到吞吐量的界限。对于延迟为L,容量为C的操作来说,循环展开因子k >=C * L时可以达到最大性能。例如浮点乘法 C为2,L为5,则展开因子k>=10 。浮点加法C为1, L为3,则k>=3时获得最大性能。(图5-12展示了i7处理器各操作的容量和延迟)
需要注意的是,浮点数的乘法和加法实际上不满足结合律的,所以对于特定的数值combine5和combine6的结果会存在完全不同的结果。
另一种打破延迟极限的方法,更加的让人匪夷所思,对combine5稍作修改如下:
for (i = 0; i < limit; i+=2) {
acc = (acc OP data[i]) OP data[i+1]; // 一次循环实际计算了两个元素
}
// 改为
for (i = 0; i < limit; i+=2) {
acc = acc OP (data[i] OP data[i+1]); // 一次循环实际计算了两个元素
}仅仅是先计算后面两个项,再计算与acc的和,结果是:
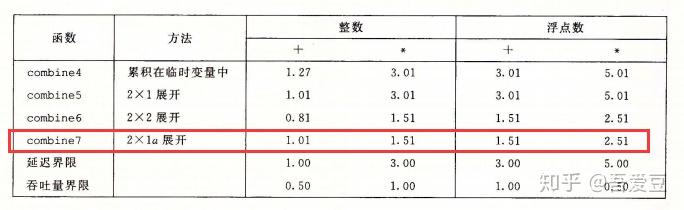
这个改动在浮点数上,已经跟combine6使用多个累积变量效果一致了。这是为什么呢?
上面的改动,实际上等价于acc +=data[i]+ data[i+1]或者 acc *=data[i]* data[i+1],这说明使用 +=*=是个好习惯,在自己不知道的情况下优化了计算。
从操作流程图上来看,也依旧充分的利用了流水线的特性。就是说第一次迭代开始计算acc * 临时结果这个乘法的时候,下一次迭代的data[2]* data[3]就可以开始了,因为这个乘法不依赖acc,不需要等acc乘法的结果。
看到这里,应该能够明白前面那个计算多项式的习题中,第7行result +=a[i]* xpwr;为什么比较快了吧。
重新结合变换能够减少关键路径上的操作数量,能够更好的利用功能单元的流水线能力。编译器有时候会做一些整数运算的重新结合,但是效果并不是特别好,而使用累积多个变量是更可靠更稳定的方法。
SIMD可以使用一条指令对整个向量的数据进行操作,目前AVX的寄存器长为32字节,256位,即可以对8个32数或者4个64位数并行操作。该方法也能极大的提高一些频繁操作的数据的效率。
可以参考 SIMD简介
先来看看从combine1到combine6的性能对比:
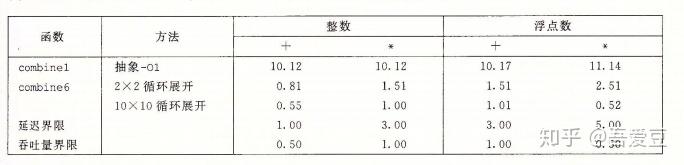
以整数加法为例,从10.12的CPE,到0.55的CPE,基本逼近0.5的理论极限。几乎提升了20倍,如果使用SIMD重写,可以再获得4到8倍的提升,例如浮点数乘法的CPE能够降到惊人的0.06 。不过啊SIMD写法看起来比较复杂,可读性不强,只有那些极其需要性能的地方才用吧。
循环展开也不是可以随意数量的无限展开的,例如寄存器数量只有16个,展开数量超过16个肯定是寄存器溢出的,溢出就只能存到栈上,可能反而会降低效率。
这叫什么,过犹不及啊
前面提到过,处理器在遇到分支的时候,会直接投机的提前执行其中一个分支。这种预测如果错误,就需要丢弃掉所有的执行结果,从正确的位置重新开始取指令过程,错误处罚也就是这个地方引起的,因为指令流水线需要重新填充。
新的x86处理器增加了条件传送指令,可以用于减少分支预测。例如int a=b ? c : d; 将可能使用条件传送指令而不是跳转指令。
对于程序员而言,没什么简单的方法避免分支预测,但可以遵循下面两个原则:
注意,本节中的内存性能只考虑数据都放在高速缓存的情况。第6章会深入研究高速缓存是如何工作的,以及如何编写充分利用高速缓存的代码。
现代处理器有专门的功能单元执行加载和存储操作,这些单元内部会有缓冲区来保持未完成的内存操作请求集合。例如i7上,每个加载单元可以保持72个未完成的读请求,存储单元可以保持42个写请求。
要确定一台机器上的加载操作的延迟,这里设计了一个简单的代码,每次循环测试依赖加载的数据。
long list_len(list_ptr ls) {
long len = 0;
while (ls) {
len++;
ls = ls->next;
}
return len;
}测试表明list_len的CPE为4.0,这个测试结果与参考机的L1级cache需要4周期的访问时间吻合。
读高速缓存速度都这么慢?寄存器呢?访问需要多长时间?
这也是前面消除存储引用优化中的原因了,访问存储器慢啊。
在大多数情况下,存储操作能够完全流水线化,也就是说没个时钟周期都可以发射一个新的存储指令。例如下面的代码可以达到CPE1.0,对于单个存储功能单元的机器,已经到达流水线的极限
void clear_array(long *dest, long n) {
long i;
for (i = 0; i < n; i++)
dest[i] = 0;
}存储操作不会影响任何寄存器的值,因此,一系列存储操作不会产生数据相关,只有加载操作会受存储操作结果影响。
读写相关,会导致性能下降,因为要等待写入完成。而地址不同,则可以并行的执行,时间低的将忽略不计。例如下面的代码:
void write_read(long *src, long *dst, long n) {
long cnt = n;
long val = 0;
while (cnt) {
*dst = val;
val = (*src) + 1;
cnt--;
}
}当src和dst地址不同时,这段代码的CPE为1.3 ,而当两者地址相同时,CPE变成了7.3 。
存储单元包含一个存储缓冲区,它包含已经被发射到存储单元,而又没有完成实际存储操作的地址和数据。通过这种方式,使得存储操作不必要等到实际更新完内存之后才继续执行。而一个加载操作则需要先检测缓冲区是否有相同的地址,如果有则返回缓冲区的数据,而不是去内存中加载。
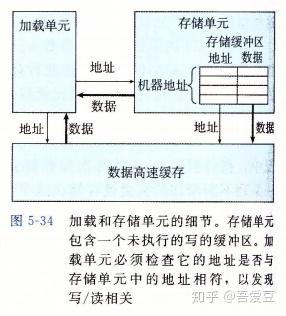
即便有了存储缓冲区,load和write相关的话,load则需要等待缓冲区写入完成才能执行,即load和write没法并行的执行。
流水线都无法开启?还是说写入存储缓冲区就得6个时钟周期?
例如第5行*dest=val;如果后续没有读请求,写入可以每个周期发射一条指令,完全不用等待。这里不太能理解第7行,怎么也要加载src啊,val依赖src,下个循环要依赖val,则间接依赖src的加载。循环CPE为什么能到达CPE1.3这么高?除非说整个流程都流水线化了,寄存器的写入依赖可以通过寄存器别名之类的优化。从而完全并行的执行循环所有操作。
从下面的流程简化图,可以略窥一斑。
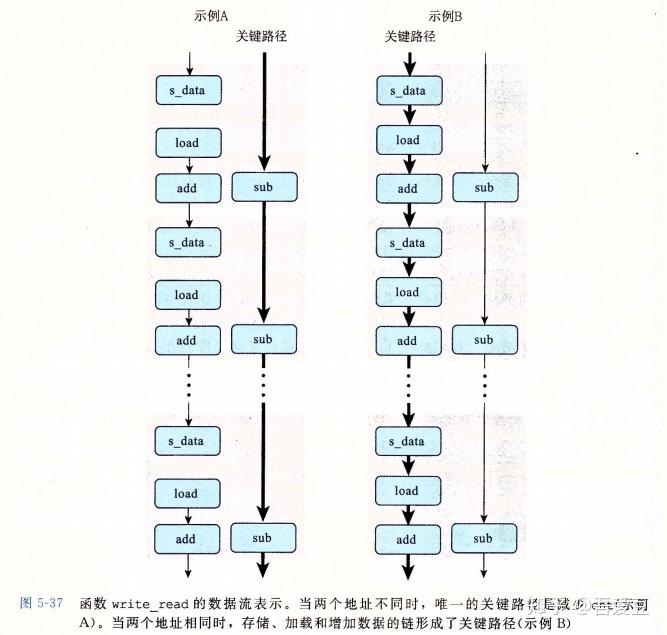
内存操作的实现包括许多细微之处,对于寄存器操作,在译码阶段,处理器就可以确定哪些指令会影响其他指令。而内存操作,则需要等加载和存储的实际地址计算出来之后,才能知道是否需要互相依赖。这种依赖会破坏并行,当加载和写入不是同一个地址时,则他们就可以并行的进行。
需要注意,优化代码不应该改变代码本身的逻辑,同样的输入应当产生同样的输出。
本章中,我们了解了一些基本的优化手段,并且知道了这些优化手段背后的原理,也知道了不同的优化手段的局限性。例如:
我们也了解了现代处理器拥有多个操作模块,对加法和浮点数也都有不同数量的操作模块,这些模块能够并行的执行,从而实现指令级别的并行执行。有了这个基础,我们才能够针对性的对程序精心的改造,以让处理器更好的并行执行。
我们还了解了内存的一些性能限制,存储单元中存在存储缓冲区,可以使得写入指令不必完全完成,就可以开始下一个指令,从而实现流水线。所以单纯的读跟写都不会是性能瓶颈,而相互依赖的读跟写则会大大影响流水线的发挥。
看了不等于会用,这些优化手段乍一看好像很厉害,但是想快速的用到实际项目中却并非那么容易。为什么,除非恰好是一个数学类的计算,其他情况下各种循环中操作的内容都相当的复杂,各种函数调用。但是没有关系,学习的是一个方法论,培养自己的这种意识,慢慢的去想办法实践。


